Two flags protocol
- Mar 29, 2019
- 5 min read
Updated: Apr 2, 2019
made in collaboration with Idit Barak.
1/ critical
A flag protocol defines the proper way to handle, place and fly the national flag. Most protocols discuss two stations of the flag: half-staff and full staff. Half-staff refers to a flag flying below the summit on a pole on land or on a building. In many countries, this is seen as a symbol of respect, mourning, distress, or, in some cases, a salute. The requirement is to ascend the flag to full-staff before descending back to half-staff. Full-staff refers to a flag flying at the summit on a pole on land or on a building. In many countries, this is seen as a symbol of victory, day of celebration and Achievement. When flying the flag full-staff it is generally accepted to fly the flag during day-time or else light it appropriately while flying at night.
Israel is a very nationalistic country, so the flag plays a very essential part in daily life, especially while growing up. In schools, Youth Movements, Army service, National Memorial-days and Holidays the flag is an integral part of the Israeli ‘ceremonial’ culture. As Israelis, this flag with it's very prominent Jewish iconography is a constant reminder to the 1.8 million Arab/Druze citizens that this flag is not for them. This raises important issues when thinking of national celebrations or mourning, which they are very much a part of.
Furthermore, the protocol is usually historic and rigid as traditions often are, and don’t leave room for flexibility and change. The very people who look at the flag for a sense of identity and community are not allowed to weigh in on when or how it should be raised.
Two flag staff with sheer flags dancing between the accepted flag protocols; half-staff, full staff. By eliminating the flags identities and leaving only the bare mechanism we're allowing essentially 2 objects/2 flag staffs without anyone's agenda to create a conversation, possibly a machine like dance that will underscore the complexity and Conflicting emotions of grief and victory.
We are interested in examining the tension that this object retains.
One that speaks of; pride, community, and security. and at the same time; aggression, dominance, nationalism, and fear. Will this tension be dissipated without the burden of national identity? Will the ‘dance’ be poetic and respectful? or are we so programmed to look at these flag pole as proof of dominance that this interaction will translate as a showdown?
1a / Process: Prototype and research presentation
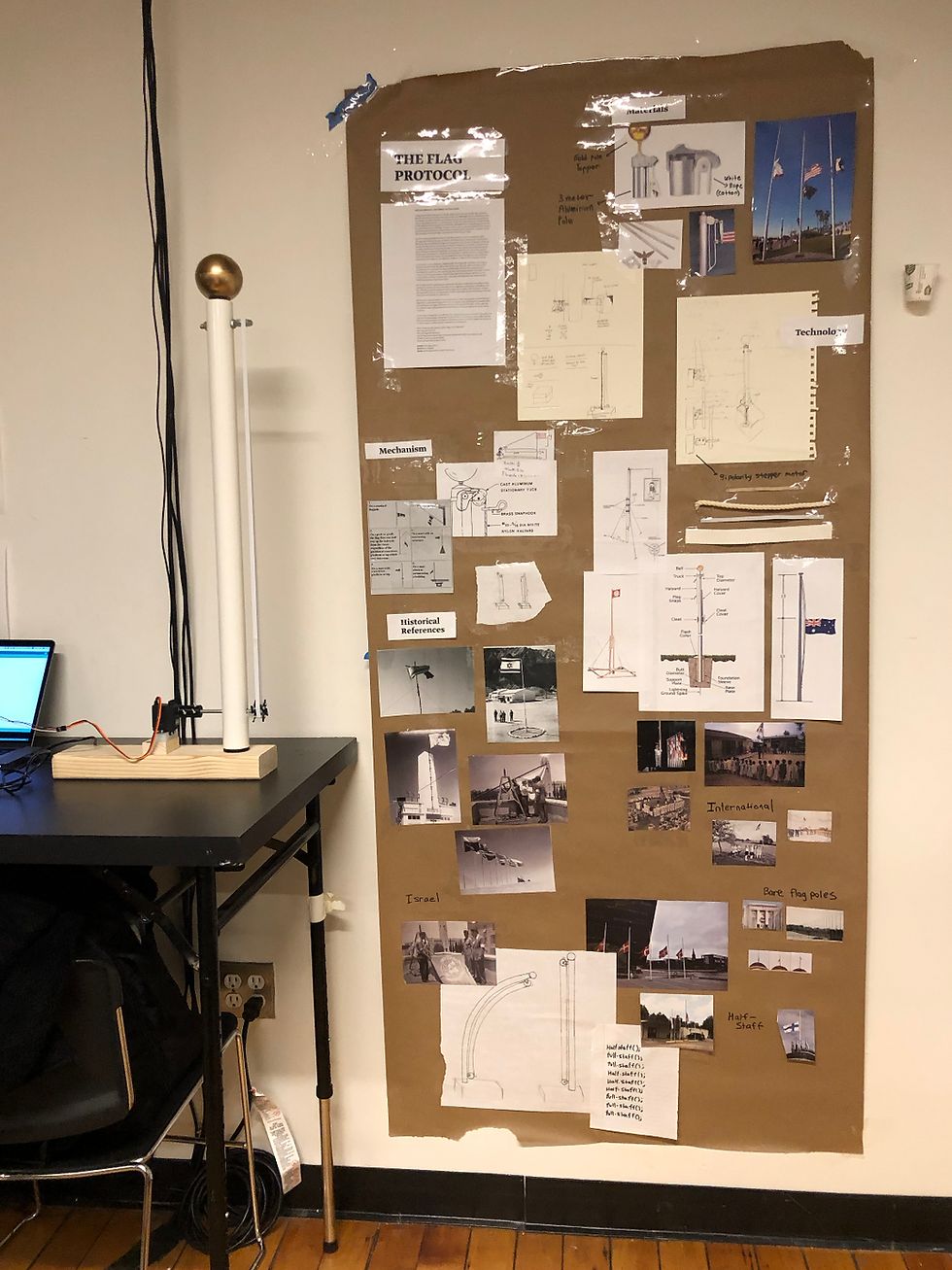
we were excited to present our concept to our peers and have them weight in on a few questions that we had:
1 / We were contemplating whether to use a random/hard-coded choreography or to attached each Flagstaff to a real countries flag protocol. In one instance were removing both symbolic token and attachment, the flagstaffs become dancers in the vacuum of thought. on the other just the symbolic token which underscore the political and historical significance of the chosen countries.
2 / whether the project would be more effective with a flag or without one.
3 / one or two flagpoles?
We got really good feedback from the class, most of our classmates commented that we were in a good/central point on the design/criticality and technology triangle. we understood that there is a gap in the recognition of the flagpole as a universal symbol. therefor, in order to create a conversation and engagement with our users we decided to put a sheer flag on our flagpoles. Finally, we chose to hard-code our flagpoles movement and not relay on DATA since we want to control the visual in a way that will convey our message to the viewers in a significant way.
2 / design
The object consists of 2 parts The flagpole and the flag Our pole design was inspired by the most iconic and official flag pole posts in order to trigger that sense of familiarity of this collective memory. commonly made of 6063 Aluminium, metal pulleys, natural cotton rope, flag, flagpole ball topper.

Detail:

Materials:
4 X 1.5 meter PVC 3"diameter pipes
2 X PVC couplers
2 X Bell-drain (used as stands)
4 X 4inch Pulleys
12 meter Cotton sash cord 3/8 inch
4 X threaded 1/4 inch rhode



We spray painted the pipes, base, couplers and pulleys in silver matt making it feel like it is aluminium.
FAILED COUPLERS
one was too big, one was too small and one was out of proportion. in the end we set together with Sid and made one that would fit to our measurements and requirements.

The coupler
For the flag we took a different approach, while maintaining the classical proprtions and materiality we decided to strip it of all identifiable symbolism. leaving it be 'tabula rasa' for the viewer.
Materials:
Silk organza
dimension: 32X23 Inch
Stitch and fold hem
vinyl corner enforcement and metal eyelets.

detail:

3 / technology
Our proof of concept started with a continues rotation Servo motor, examining questions like: friction, tension, power and weight.
Lessons learned from mockup execution:
- servo motor is not strong enough, knowing that we will need to move 6 meter of rope that climb to 3 meter height.
- we must use a continues motor because of the distance
- 2 pulleys are necessary (in the model we were using only one and a ring at the top of the pole)
- since we don't want to use timing-belt (the iconography of the rope is very important to us) we will use ball bearing to ease the shafts movement and reduce friction in order to give the motor a powerful/smoother rotation.
- we 3d printed custom couplers (to save money)
- we need to find a solution for mounting the motor to the flag pole in order to create stability
- after frying ESP32 board with a bad H-BRIDGE connection we decided to buy drivers for the stepper motors which will allow us a smoother operation.

We ordered a Stepper motor - NEMA-17 size - 200 steps/rev, 12V 350mA and a EasyDriver for the stepper motor. which made our process much more easier and aesthetically pleasing.
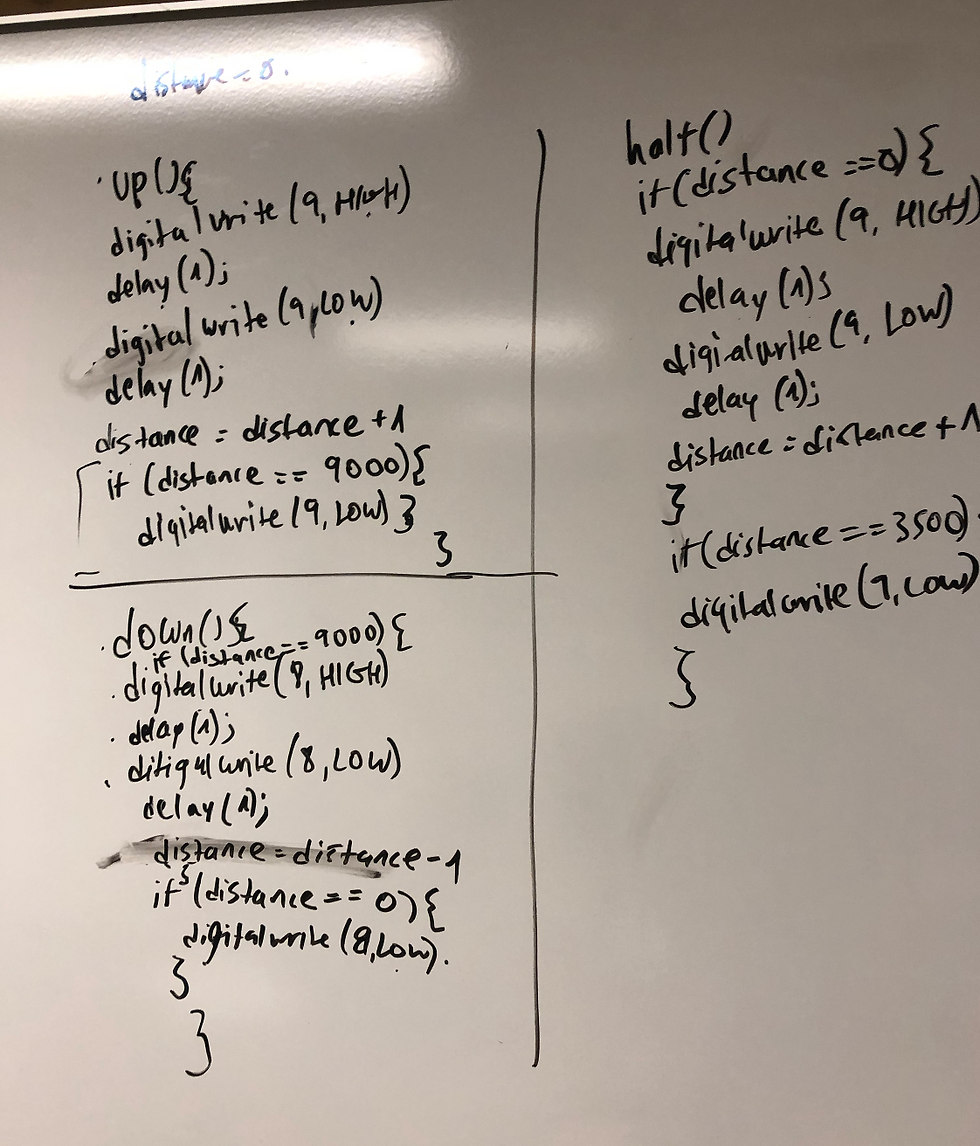
we got it to work very nice and also understood how to create our own functions for the half-staff and full-staff for our work + control on the steps: how fast and how slow would the motor go.
We designed together with Sid a motor coupler that would hold the motor and the pipe steady. 3d printing this part took three and half hours for each part. The last day of work, was the hardest and the most complicated, we needed to put everything together including the code.

Cutting the rope, sawing it together. taking every cautious act not to put too much pressure on our mechanism. the tension is very delicate.

The code was the fun part, it is the first time that something in physical computing is going to smooth, the documentation of the easy driver was very throw and helpful. with the help of Sukanya and Arnab, we were able to write the function for each state. reading the distance and keeping track of number of the function that we are at in order to make more conditionals.
Fabrication wise, we were very precise with planning, everything had a place and that was very helpful in the moment of stress where we wanted it to look nice and clean.

The biggest lesson that we learned is that stepper motors lose steps, almost every time the flag went up, the distance was changing. we are going to implement a Nstop in order to keep track on the distance.
Pictures from our Midterm presentation:


Video:

Comments